§1. Введение в релевантную геометрию
Определение. Релевантным базисом (Ϟ-базисом) в пространстве будем называть три геометрических вектора aϞ, bϞ, cϞ, удовлетворяющих следующим условиям-аксиомам:
1. aϞ ⊥ bϞ, bϞ ⊥ cϞ, aϞ ⊥ cϞ
2. |aϞ| = |bϞ| = |cϞ| = Ϟ → 0
3. V = Va · aϞ + Vb · bϞ + Vc · cϞ => {Va, Vb, Vc} ⊂ Z
4. V = Va · aϞ + Vb · bϞ + Vc · cϞ => |V|Ϟ = Ϟ · (|Va| + |Vb| + |Vc|) = |ПрaϞV| + |ПрbϞV| + |ПрcϞV| (релевантная длина вектора)
Релевантный базис на плоскости будем определять аналогичным образом.
Замечание. Векторы релевантного базиса будем обозначать в дальнейшем через iϞ, jϞ, kϞ. Если V = Vi · iϞ + Vj · jϞ + Vk · kϞ, то числа Vi, Vj и Vk будем называть бесконечными координатами вектора V относительно релевантного базиса iϞ, jϞ, kϞ, а числа xϞ = Ϟ · Vi, yϞ = Ϟ · Vj, zϞ = Ϟ · Vk - конечными координатами вектора V.
Релевантную длину любого вектора можно выразить через его конечные координаты следующим образом: |V|Ϟ = |xϞ| + |yϞ| + |zϞ|.
Определение. Под релевантной системой координат в пространстве будем понимать систему координат, определяемую заданием релевантного базиса - трёх векторов iϞ, jϞ, kϞ, для которых выполняются перечисленные выше условия-аксиомы, и некоторой точки O - точки приложения векторов релевантного базиса.
Под релевантными координатами произвольной точки M пространства будем понимать координаты вектора OM относительно релевантного базиса iϞ, jϞ, kϞ.
Дискретными осями OxϞ, OyϞ и OzϞ будем называть три луча, исходящих из точки O параллельно векторам iϞ, jϞ, kϞ соответственно.
Релевантную систему координат на плоскости будем определять аналогичным образом.
Прежде всего выведем формулу, связывающую обычную, "действительную", нерелевантную длину вектора, не зависящую от выбора системы координат, с его релевантной длиной на плоскости.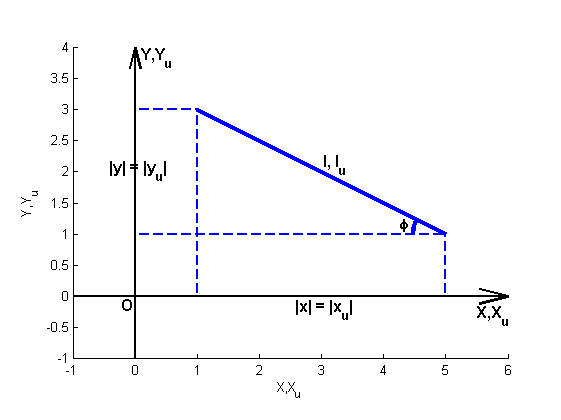 Пусть некоторый вектор имеет релевантную длину lϞ и нерелевантную длину l, его конечные координаты равны x = xϞ и y = yϞ и образует с одной из релевантных осей угол Φ.
Пусть некоторый вектор имеет релевантную длину lϞ и нерелевантную длину l, его конечные координаты равны x = xϞ и y = yϞ и образует с одной из релевантных осей угол Φ.
Квадрат его нерелевантной длины можно вычислить по формуле: Из формулы же для его релевантной длины получаем:
Из формулы же для его релевантной длины получаем: Из образовавшегося на рисунке прямоугольного треугольника несложно найти, что
Из образовавшегося на рисунке прямоугольного треугольника несложно найти, что Таким образом, компонуя все приведённые выше формулы и учитывая формулу синуса двойного угла, приходим к конечной формуле:
Таким образом, компонуя все приведённые выше формулы и учитывая формулу синуса двойного угла, приходим к конечной формуле: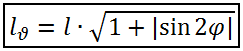 Аналогичными рассуждениями можно прийти к формуле, связывающей релевантную и нерелевантную длины любого вектора в пространстве. Пусть cos α, cos β и cos γ - его направляющие косинусы, тогда формула примет вид:
Аналогичными рассуждениями можно прийти к формуле, связывающей релевантную и нерелевантную длины любого вектора в пространстве. Пусть cos α, cos β и cos γ - его направляющие косинусы, тогда формула примет вид:
Замечание. Во-первых, из выведенной нами формулы вытекает, что на плоскости релевантная длина любого вектора не меньше его нерелевантной длины: Во-вторых, несложно заметить, что углом Φ в формуле, связывающей релевантную и нерелевантную длины вектора, может являться любой из углов (как острый, так и тупой) между вектором и одной из релевантных осей (как OxϞ, так и OyϞ).
Во-вторых, несложно заметить, что углом Φ в формуле, связывающей релевантную и нерелевантную длины вектора, может являться любой из углов (как острый, так и тупой) между вектором и одной из релевантных осей (как OxϞ, так и OyϞ).